郑州大学橡塑模具团队在双模态柔性感知材料领域取得重要进展
近日,橡塑模具国家工程研究中心团队在双模态柔性感知材料领域取得重要进展。研究成果以题为“Flexible Bimodal Sensor with Integrated Tactile and Bioelectrical Signal Perception for Human-Computer Interaction Systems”发表在国际知名学术期刊《Advanced Functional Materials》,论文的第一作者为橡塑模具国家工程研究中心2022级博士生王孜琦和杨文科副教授,通讯作者为中心教师刘虎教授。
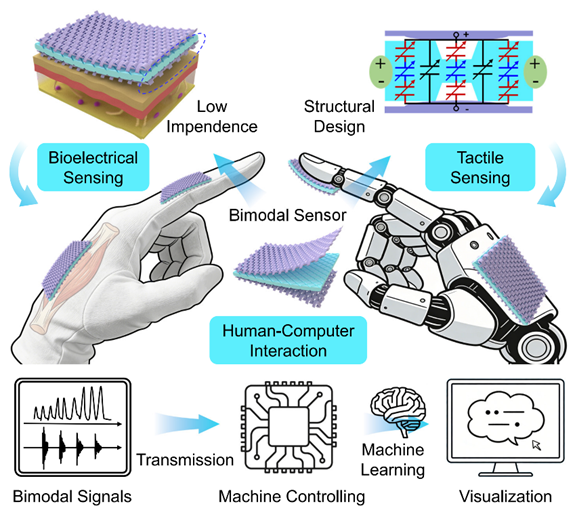
智能人机交互系统的发展需要能够与人体无缝集成并解码多维生理和物理信息的感知技术。本工作设计了一种新型柔性双模态传感器,用于同步感知触觉压力信号和运动生理电信号。其中触觉传感单元的核心是电容式压力传感器,它是由冷压微结构聚-(偏氟乙烯-六氟丙烯)[P(VDF-HFP)] 电介质层与可压缩碳织物(CF)电极集成得到的。该复合结构具有卓越的可压缩性和可控微间隙,使其在0-8 kPa和65-240 kPa的宽工作范围内达到0.221 kPa-1和14.11 MPa-1的高灵敏度。此外,CF共用电极的设计还建立了低阻抗表皮耦合,这对于高保真运动生理电信号的监测至关重要。该传感器可以输出具有明显的PQRST峰值的心电(ECG)信号,以及高达21.66 dB(弯举)和12.50 dB(握持)信噪比(SNR)的肌电信号,制备的双模态传感器与商业生物电极结果相当。由于其优异的双重感知能力,由该传感器集成的人机交互系统能够实时控制机器手,并在机器学习的辅助下实现双重加密摩尔斯电码通信。这项工作为下一代智能系统的多功能传感系统的开发确立了新的设计范式。
该研究得到了国家自然科学基金(52373093, U25A20252),河南省优秀青年自然科学基金(242300421062)和河南省中原青年拔尖人才计划等项目的支持。
文章信息:Ziqi Wang#, Wenke Yang#, Xinging Wang, Donghua Xing, Shun Liu, Yalong Wang, Hongling Sun, Hu Liu*, Chuntai Liu, Changyu Shen. Flexible Bimodal Sensor with Integrated Tactile and Bioelectrical Signal Perception for Human-Computer Interaction Systems.
