一.项目概述
目前我国农业作业智能化程度低,虽然粮食作物部分做到机械化生产,但此生产方式仅仅是简单代替人力作业,而且作业方式单一,无法整合多种农业作业方式,农业作业潜力没有得到很好的发掘。在当今互联网+、物联网和大数据的普及和拓展下,农业方面并没有与该领域很好的结合。该多功能农田联网作业车将对农业多种作业方式整合在一台机器上,同时搭载互联网终端,开发网络平台做到农业互联网+,推进我国智慧农业的发展。
本产品为自主设计的蜘蛛仿形机械结构,发明整合了Delta机械臂、视觉识别等技术,在做到简化机器构造的同时达到稳定、高效、精准、无人控制等工作要求。Delta 机械臂可装载用于施肥、土壤检测等其他类型工具,使机器做到多功能整合。机器搭载数据接收、发送终端设备,使机器联网,实时反馈作业区域数据状况,能让农户、专家即使掌握田地状况,便于处理问题,为田地、农户、专家搭载平台,达到农业智能化生产的要求,引导中国智慧农业发展。
项目初期可以实现水果等目标物的连续采摘,并通过机器学习逐步提高识别效率和精度;中期研发其他功能作业工具,实现播种、断茎等农业作业,也可用于监测土壤、空气、光照、温度、作物长势与病情虫灾;后期发展物联网功能,将机器收集到的数据上传云端,结合云端数据机器采取自主灌溉施肥等操作,将农户解决不了的问题连接云端或者远程专家解决;最终建立智慧农业一体化平台,实现线上线下整体联通。
二.创新点
1.理念创新
本项目创新性的提出
(1)农业机器整合化,即一台机器可以进行多种农田作业。
(2)农业机器联网平台化,农田作业机器进行数据整合传输,通过互联网app实现数据共享。
2.应用创新
(1)以机器取代劳动力,提高了工作效率,整合了农业生产模式,做到农业平台化,实现农业互联网+
(2)农业智能化对农业集中化生产,点对面管理提供了重要的前提保障。农户不再需要到田地里工作,极大改善了农户的作业条件,农业专业问题通过互联网平台像专家求助,快速便捷解决问题,使农户享有我国互联网发展的红利。
3.结构创新
(1)蜘蛛仿形机械结构,提高了稳定性,也加大了作业工具的作业范围。
(2)Delta机械臂与作业工具之间的拆卸结构经过优化设计,便于拆卸。为功能整合提供保障。
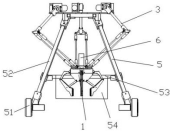
图1
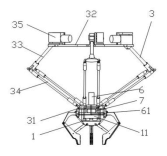
图2
本机器结构主要包括:
1为作业工具(可更换),3为Delta机械臂,5为行走机构,6为气嘴阀(可拆卸),7为轴承,11为底座,31为底座上盖,32为静平台。33为驱动臂,34为平行四边形从动支链,35为驱动电机,51为驱动轮,52为支架,53为横杆,54为篮子(可拆卸)。
其中作业工具1图示为采摘器,为作业工具之一,实际操作中可搭载其他作业工具,篮子54可根据不同作业情况选择搭载拆卸,气嘴阀6可根据不同作业情况选择搭载拆卸,底座11、底座上盖32为作业工具统一外部构架用于搭载摄像机和内部硬件,篮子54可根据不同作业情况选择搭载拆卸,静平台32上方搭载摄像头,STM32单片机,开发板、信号发射器等电子元件,静平台32下方搭载电池。
驱动电机35与静平台32固接,驱动电机35与驱动臂33固接,底座上盖31与底座11固接
三.研发团队
裴雷,郑州大学机械工程学院2016级本科生,团队项目负责人;
金栋,郑州大学机械工程学院2015级本科生,机械结构设计;
唐红松,郑州大学机械工程学院2016级本科生,比赛负责人;
冯齐全,郑州大学化工与能源学院2015级本科生,视觉识别;
四.所获成果
奖项:
2017年第十一届iCAN国际创新创业大赛中国总决赛--三等奖
第十一届iCAN国际创新创业大赛华中II赛区选拔赛--二等奖
第八届全国大学生机械创新设计大赛河南赛区--二等奖
郑州大学第三届“创青春”大学生创业大赛--一等奖
郑州大学大学生“创·梦”创新创业项目路演创意组--优秀奖
第二届清洛先进制造大赛--优秀奖
专利:
正在申请发明专利1项,实用新型专利2项




