个人简介:
王杰,工学博士,硕士生导师,郑州大学机械与动力工程学院讲师,主要研究方向为机器技术、鲁棒控制、强化学习、模型预测控制、优化算法等,相关研究成果在《IEEE/ASME Transactions on Mechatronics》、《IEEE Sensors Journal》等国际期刊上发表SCI论文10余篇。
基本资料
办公地点:郑州大学机械与动力工程学院403室
联系方式:zzuwj@zzu.edu.cn
学科方向:智能机电技术
研究方向:机器人应用技术、机器狗、强化学习、模型预测控制
工作教育经历
2011/09-2021/02 韩国釜山大学 机械工程学院 本硕博 控制自动化系统(硕博专业)
2021/04–至今 郑州大学 机械与动力工程学院 讲师
科研项目
[1] 企业委托项目,核电用冗余双驱齿轮传动控制系统开发 ,2023~2024,主持;
[2] 国家重点研发青年科学家项目,2023.12~2026.11,参与;
代表性论文及发明专利
[1]. Jie, W., Yudong, Z., Yulong, B., Kim, H. H., & Lee, M. C. (2020). Trajectory tracking control using fractional-order terminal sliding mode control with sliding perturbation observer for a 7-DOF robot manipulator. IEEE/ASME Transactions on Mechatronics, 25(4), 1886-1893.
[2]. Kim, J., Jie, W., Kim, H., & Lee, M. C. (2021). Modified configuration control with potential field for inverse kinematic solution of redundant manipulator. IEEE/ASME Transactions on Mechatronics, 26(4), 1782-1790.
[3]. Xuan, W., Jian-She, G., Bo-Jie, H., Zong-Shan, W., Hong-Wei, D., & Jie, W. (2022). A lightweight modified YOLOX network using coordinate attention mechanism for PCB surface defect detection. IEEE sensors journal, 22(21), 20910-20920.
[4]. Jie, W., Cheol, L. M., Jaehyung, K., & Hee, K. H. (2021). Fast fractional-order terminal sliding mode control with rbfnn based sliding perturbation observer for 7-dof robot manipulator. IEEE Access, 9, 67117-67128.
[5]. 王宗山,丁洪伟,王杰等.基于正交设计的折射反向学习樽海鞘群算法[J].哈尔滨工业大学学报,2022,54(11):122-136.
[6]. 高建设,刘陆骐,王杰等.基于模糊控制的上肢康复机器人变导纳控制[J].郑州大学学报(工学版),2024,45(01):12-20.DOI:10.13705/j.issn.1671-6833.2024.01.002.
招生专业
[1] 080202 机械电子工程:07(全日制)机器人及精密运动控制技术
[2] 085500 机械:01(全日制)机械工程
每年计划招收1~2名硕士研究生,欢迎有意向加入课题组的同学将个人简历发至邮箱zzuwj@zzu.edu.cn,我会第一时间与你联系,电话:19138178912 !
招生研究方向: 上肢康复机器人导纳控制、四足机器狗运动控制、鲁棒控制。
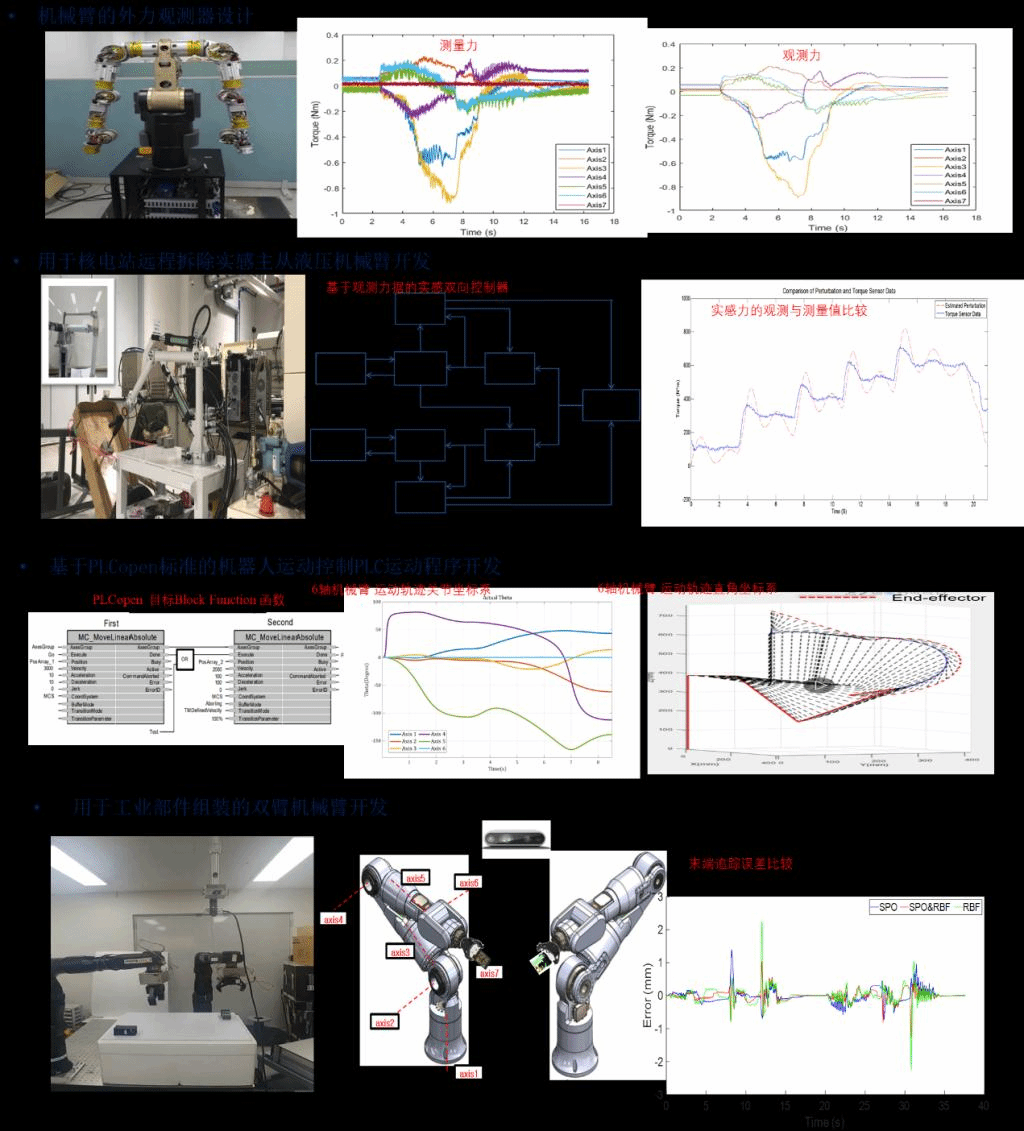
过往项目展示