一.产品介绍
随着人们生活水平质量的提高,人们对健康养生观念越发重视,水果中含有大量的维生素等营养物质,能够起到抗衰老,保健康的功效,收到人们的广泛欢迎,但水果在采摘方面存在着效率低,采摘难度大等问题大大限制了水果种植业的发展。 每到秋天,水果丰收的季节,在果园中随处可见大批的采摘工人人工采摘成熟的水果,大大占用了大量的人力资源和增加了劳动成本,我们所设计的这款苹果/桔子辅助采摘器的目的就是为了解放采摘工人的双手,解放不必要的劳动生产力。
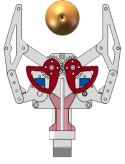
本装置由双目摄像头,欠驱动直线平夹式自适应机械爪,三自由度机械臂以及三个可调节高度的升降杆组成。集双目摄像头自动识别,机械爪与三自由度机械臂采摘与收集水果为一体,果园主在使用该机器时,只需将该装置放于要采摘的果树旁边,并调节好一定的高度,该机器就可以自动工作,最大限度的减轻人力负担,解放采摘工人的双手。

产品模型图
二.产品亮点
(1)此产品相较于国内市场上普遍存在的采摘杆,自动化程度高,更好的解放了人力,并且抛弃了传统的抓取牵拉水果使果茎断裂的方式,采用了切割果茎的方式,更好的保护了水果树。相较于国外研发的全自动水果采摘机器人,拥有结构较为简单,造价低,可大量生产的优点,更易于进入市场。
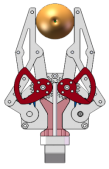
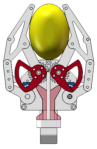
(2)拥有特殊设计的夹持结构:机械爪采用了欠驱动直线平夹式自适应爪,能够同时实现直线式平行夹取以及自适应包络水果的两种模式,使夹取更为牢固,还可以适应不同的水果外形,为推广到更多种类水果的采摘做准备,通过机械方式减轻了机械臂控制负担,大大增强了夹持过程中的适应能力。
以下为直线式平夹模式:

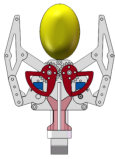
以下为自适应模式:
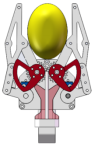
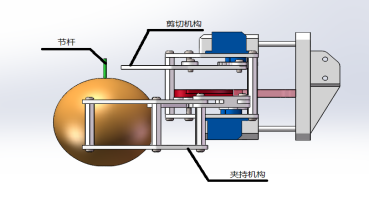
(3)在机械臂的加持装置和裁剪装置之间留有一定的距离,可以在采摘下来的水果上面留有一部分的茎,能够有效的保持水果中所含有的水分,大大延长了水果的保质时长,避免出现因为水果采摘过多堆积在一起腐坏的情况,保护了农民的收益,如下图所示:
三.使用说明
在使用时,实现半自动化,使用者只需在固定时间调整该机械的位置并且根据树高调节升降杆的高度,该辅助机械就可以完成自动的识别与抓取采摘,最后使用者再来收集即可。
四.研发团队
金栋,郑州大学机械工程学院2015级本科生,项目负责人,机械结构设计
冯齐全,郑州大学化工与能源学院2015级本科生,视觉处理
曲国宁,郑州大学信息工程学院2015级本科生,电子控制
李祖光,郑州大学基础医学院2017级本科生,机械结构制作
张宇哲,郑州大学信息工程学院2017级本科生,机械结构制作
五.所获成果
第八届机械创新设计大赛河南赛区一等奖

