一、作品介绍
随着近年来智能技术的发展,机器人已经逐渐走进人们的生活。同时,伴随着我国人口的老龄化程度的加重,生活水平的进一步提高和技术的发展,机器人在家庭服务、家庭养老、助残、医疗等领域所发挥的作用将会越来越大。服务机器人在上述领域的市场需求也将逐渐增加。
然而现有的服务类机器人,大都采用双轮差速的移动方式,身躯庞大,转向动作幅度大,转弯效率低,对运动空间有一定要求,能够在酒店大堂、餐厅这种较为开阔的场地工作,但无法在狭小复杂的空间中可靠地使用,例如像普通家庭、养老院、医院病房等这类较为复杂的工作环境。
正是在这种背景下,我们团队大胆创新,设计出了“球形轮自主导航机器人平台”(以下均简称为“该机器人”),旨在开发出一款适应复杂地形(如家庭环境),精度较高,较为可靠,成本较低的服务机器人平台。该机器人采用“球形轮”代替现在普遍采用的轮式轮胎,并结合“二维激光雷达的SLAM算法”,进行实时地图构建,可实现室内的高精度自主定位与导航,全向移动。设计新颖独特,稳定性强,灵活优雅,对复杂环境的适应力更强。
如前所述,该机器人采用平台化设计,未来可以广泛应用于家庭服务,家庭教育,医疗,养老等领域。同时平台的所有技术资料开源,可作为机器人技术学习的套件(如turtulbot),也可供第三方研发,具有较好的市场前景。
二 产品亮点
(1)颠覆传统 全向移动
方案灵感来源于GOODYEAR轮胎橡胶公司在去年日内瓦车展上发布的一款球形轮胎,其目的是基于磁悬浮技术代替现在车辆上的轮形轮胎,实现车辆零半径转弯以及全方位移动。基于球形轮的自主导航机器人的优点是可进行全向移动,颠覆传统机器人的移动方式,使用球体代替现有机器人的轮式轮胎,使机器人能够全向移动,灵活优雅,对复杂环境的适应力更强。
(2)自主导航 自主定位
采用当今比较热门的自主导航技术,可在无GPS信号的情况下在密闭空间内进行实时地图构建,自主定位与导航。实现方式可采用功耗低,效率高,成本低的激光雷达。
(3)抗干扰能力强 能够适应不同路况
设计方案对机器人的移动采用PID闭环调速算法,能够精确地控制机器人的移动方向和移动速度,尤其在不同路面情况下(如上坡下坡等情况)都具有很强的抗干扰能力,以控制速度能够快速达到理想稳定的状态。
(4)平台市场价值巨大
综合以上创新点及优势,球形轮胎机器人平台的市场应用前景十分宽广,基于球形轮胎机器人平台可以改装制造自动导航无人驾驶送货车辆,或狭小办公室区域运送文档快递的机器人,对复杂地形及危险环境(如有毒气体或核污染的空间)的无人操控探索机器人,具体市场应用我们将在后文给予详细介绍。
三、工作方式及技术参数
目前我们已经制作完成了第一代样机(如下图所示),预期功能基本实现,该机器人可以实现室内自主导航,也可以通过蓝牙连接手机进行控制,人机交互功能较为强大。

机器人实物图
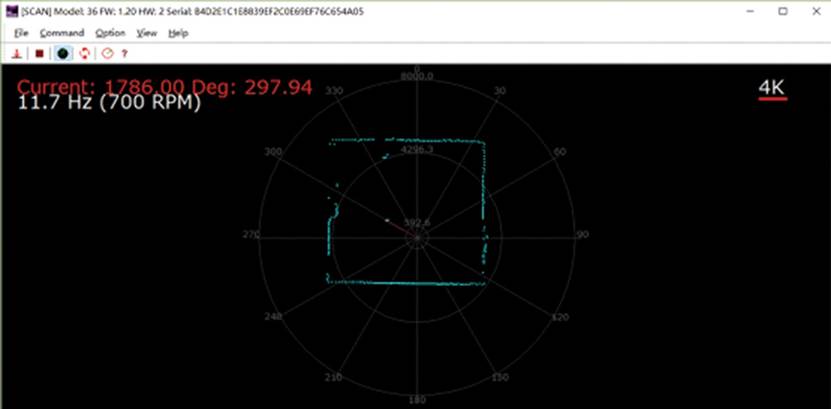
扫描获得实验室地图

手机控制APP界面
技术指标
整机尺寸:280mm×280mm×395mm
电池型号:25.2V 3300MAH可充电锂电池
最大工作时间:4小时
激光雷达参数
最大扫描半径:6m
角分辨率:0.9度
扫描频率:4000次/秒
五、研发团队
赵健壮,郑州大学机械工程学院2014级本科生,团队项目负责人,机械结构设计;
田源,郑州大学电气工程学院2014级本科生,上位机视觉部分;
李磊,郑州大学电气工程学院2014级本科生,PCB加工;
曹朝阳,郑州大学信息工程学院2015级本科生,硬件程序设计及调试;
李代栋,郑州大学信息工程学院2014级本科生,硬件程序设计及调试;
5.所获成果
申请实用新型和发明专利个一项《一种球形轮导航机器人》,初步审查通过;
2017年丝绸之路机器人创意大赛一等奖
中国大学生机械工程创新创业大赛(“卓然杯”第八届过程装备创新实践大赛)一等奖。