一、项目背景:
目前市场上的平衡车产品在结构上均是利用普通的轮子,通过控制两轮的速度实现自平衡以及移动。能移动的方式分为直立、前进后退和偏航,这种平衡车的结构简单,控制实现也较为容易,但灵活性不高,运动性能不强,不能实现全方位的快速自由移动,而全向移动车在结构上虽然采用了麦克纳姆轮,能实现全方位的自由移动,但由于采用了四轮结构,使机器的占用空间较大,不利于机器的存放与使用,同时,该平衡车不能实现在狭小空间内的自由工作,应用范围具有较大的局限性。 鉴于以上两者的局限性,我们设计出了一种不同于以上两者,既能实现全方位的自由移动,又可在狭小的特殊环境中正常工作的新型自平衡车平台。
全向自平衡车是一个不稳定性系统,但其动态性却是相当好,而且其占地小,移动便捷,利用这些特点可以实现很多功能,应用范围较为广泛。比如:作为一种交通工具;在医院里可以作为便携医疗设备;可用于在空间狭小的特殊环境中的勘探检测等任务。最重要的是,它是一种全新的开发平台,通过搭载不同的装置,可应用于不同的市场领域。具有较大的市场前景。
二、工作原理:
1.动态平衡系统
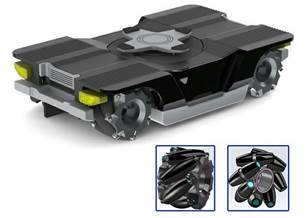
由于全向移动平衡车的四轮麦克纳母轮的独立运动结构,使得它的重心支点以下,故在非控制状态下为一不稳定系统。可以利用摆钟的摆动原理,通过微处理器的控制使它能够如摆钟一样稳定在一个平衡位置,并能在保持平衡的状态下按照使用者的指令要求正常运行。

2.全向移动系统
由于45度麦克纳母轮的独特结构,使得该平衡车能独立的进行,横向运动,自转运动,全方位的自由移动等。全新的结构衍生出全新的算法,全向移动平衡车的控制算法程序至今未有个人或组织公开声明,说明这是一个极具创新意义的产品。
三、创新点:
1、采用麦克纳姆轮可实现全向移动,运动灵活。
2、四轮安装采用一字线分布,空间占有量小并且横截面大大减小,在空间要求高的环境下(比如舰艇)相比同类产品优势突出,此外,在某些空间狭小的环境(比如过道)通过时不再受运载平台尺寸的限制。
3、机械结构创新,麦克纳姆轮与平衡车原理有机结合产生出新的结构,弥补了各自的不足的同时又保留了各自的优点。
四、实验情况:


五、所获荣誉:
1、第十届国际大学生iCAN创新创业大赛 全国一等奖
2、丝绸之路机器人创意大赛 全国二等奖
3、大学生“挑战杯” 河南省一等奖
六、研发团队介绍:
(团队技术骨干来自于郑州大学深蓝科技部)
李解:负责机械设计。
王轸:负责算法开发以及设计程序。
金栋:负责算法开发以及设计程序。
陶一文:负责项目进度把控。
祁奕:负责外观包装与设计。

